

2022: A year in review
Experiments with micro-ROS, AKROS upgrades, and ROSCon 2022


I know it's quite late for this post, but it has certainly been difficult getting my head out of the holiday period. But it is high time I sit down and look back at the rollercoaster ride that was 2022. First, I must get myself a mug of Bradley's No 29 tea, an amazing ginger and orange green tea, definitely one of my favorite finds of last year.
Kicking off 2022
I started 2022 by finishing off the software of the AKROS robot, having configured the ROS Navigation Stack, a few behaviors using BehaviorTree.cpp 3.x, and a closed loop control system that resulted in precise, reliable motion of the robot. For the first few months of 2022, I was ready to make some upgrades - The first being adding a wireless charging module.
The next step was to set up the URDF of the AKROS robot with the correct meshes and be able to visualize them on Foxglove Studio. During this period, I also got a sturdy carrying case with foam inserts so that I could safely carry the robot around for demos, and store it when it wasn't being used.
First steps to ROS 2 Galactic
Midway through the year, I decided that it was time to upgrade the robot even further - this time focusing on the software - from ROS 1 Noetic to ROS 2 Galactic. However, this was not a straightforward upgrade. My first step was to upgrade the low-level control firmware running on an Arduino Mega. One of the most important features of ROS 2 is micro-ROS (or ROS 2 for microcontrollers), which allows a microcontroller to communicate directly with ROS 2 messages instead of relying on ROSSerial which converts serial messages to ROS messages on the host side. Unfortunately, micro-ROS is not compatible with the Arduino Mega, so I decided to use a Teensy 4.1 and was luckily able to find a breakout board in the same form factor as the Arduino Mega. I also had to get new motor drivers that run on 3.3v from the Teensy instead of 5v supplied by the Arduino Mega.
Experimenting with micro-ROS
With these changes, the hardware of the AKROS2 platform was ready. However, I still hadn't written any micro-ROS code yet, so first I had to learn and experiment. I started by collecting a few microcontroller devices that I had lying around - an Arduino Portenta H7 (lite connected), an Arduino Nano RP2040 Connect, a Raspberry Pi Pico, and finally, the Teensy 4.1. Over the months of June and July, I played around with micro-ros-arduino (the micro-ROS libraries for the Arduino IDE), and the example firmware with each of the different devices I had collected. I also tried the examples with different communication methods - Serial, UDP over Ethernet, and finally UDP over Wifi (of course, with the devices that supported these methods). These experiments were very useful for learning micro-ROS, especially by having these different microcontroller devices at hand. Due to technical difficulties, I had to stick with the Arduino IDE and was unable to set up a working installation of micro-ros-platformio to use with VSCode and PlatformIO. I believe this was because I was using Windows 10 (later Windows 11) and the micro-ROS PlatformIO libraries seemed to be specifically for installations on Linux. The Arduino IDE worked, so for the time being, I decided to stick with it.
Upgrading to AKROS2
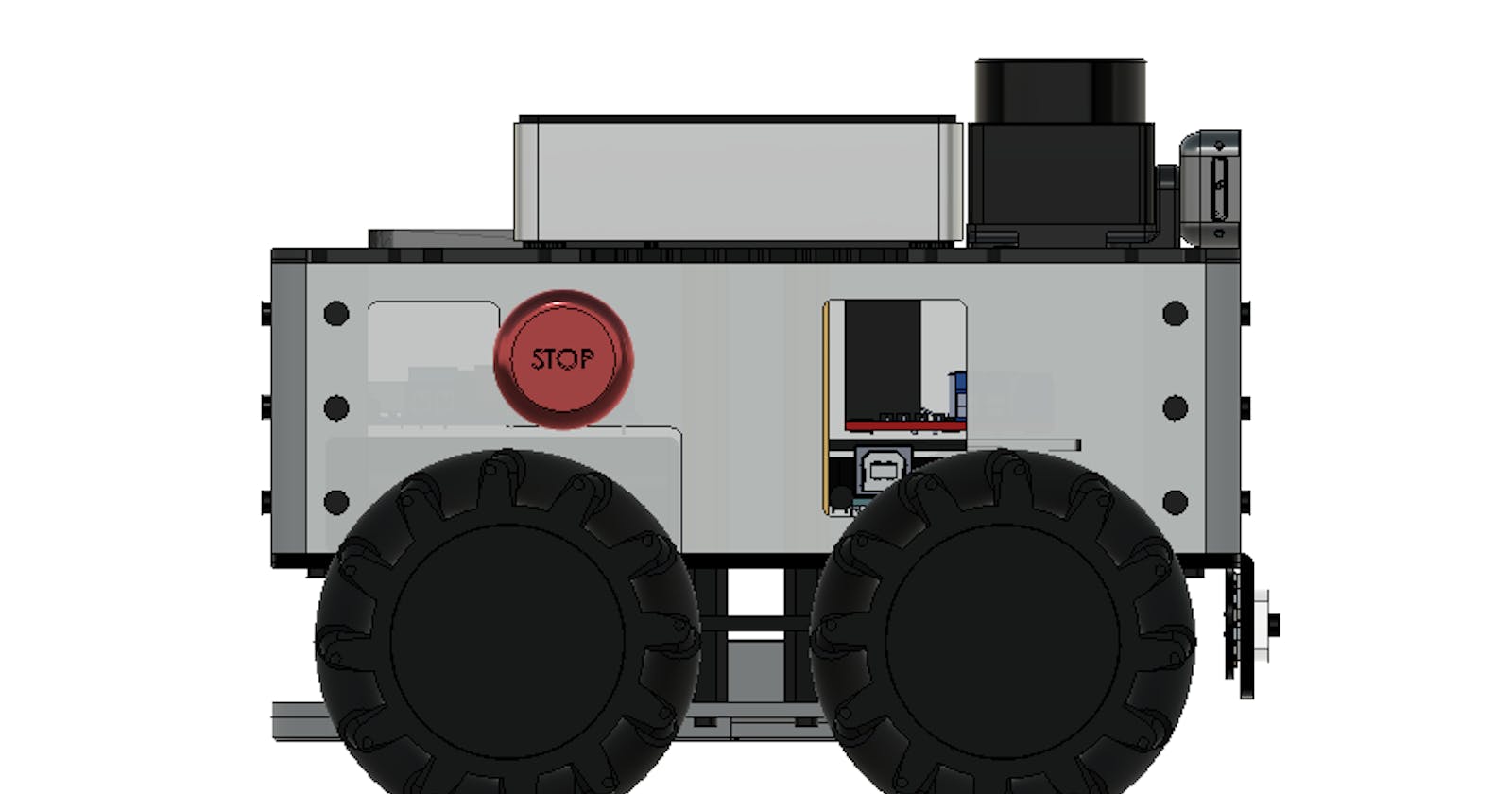
During this period, I also made hardware upgrades to the AKROS2 robot - replacing the 3D printed Raspberry Pi cover with a Flirc case, changing the position of the LD06 Lidar, and using a matte black acrylic top panel instead of a translucent one.

Around this time, I first learned about the VL53L5CX ToF imaging sensor, an amazing new time-of-flight sensor that could scan for obstacles over a grid of 8x8 points. Having worked only with single-point ToF sensors before, this blew my mind. So, I purchased one and decided to spend some time on a 'side quest'. My goal was to use this sensor with the Arduino Portenta, read the sensor measurements, convert them to Pointcloud2 messages and publish these messages to the ROS 2 host. It was a fun project to do, and also made me realize the potential for sensor platforms that could natively publish ROS 2 messages with the addition of a small microcontroller device to it. With the growing interest and adoption of micro-ROS, I really hope to see more such sensors on the market that can speak ROS 2 natively...
Once I was done with this side-project, it was finally time to use my newly learned skills and upgrade the firmware of the AKROS2 robot from ROS 1 to ROS 2. I chose ROS 2 Galactic since it worked on the same version of Ubuntu as my earlier installation of ROS 1 Noetic. This allowed me to use ros1_bridge to migrate my software node-by-node instead of having to do everything from scratch on an upgraded Linux distribution. My inspiration for this upgrade was the Linorobot2 package, an open-source project that provides ROS 2 support for different mobile robot configurations such as (2WD/4WD) differential drive and mecanum wheel based systems. I also realized that the Linorobot2 package was organized in a very similar fashion to the AKROS project, so it was definitely a good place to start. The first thing to do was migrate my ROSSerial implementation on the Arduino Mega to a micro-ROS implementation using the new Teensy 4.1 and the breakout board I talked about earlier. I also took the time to set up my launch files on the ROS 2 side to bring up all my nodes and drivers, and I ended up with a hybrid system with low-level control and the sensors working with ROS 2 Galactic (and micro-ROS), and the rest of the Navigation Stack working on ROS 1 Noetic.
ROSCon 2022, Kyoto
I decided to stop at this point because I had another big thing to prepare for - my first visit to ROSCon, which meant my first-ever visit to Japan. Japan had been at the top of my travel list for a very long time, so I had a lot to plan out for my 5-day trip to Kyoto. The trip finally happened in October, and it was definitely the top highlight of 2022 for me. I learned a lot during the talks and workshops, saw and operated some incredible new robot platforms, and got a chance to meet and network with some of the top roboticists in the world. I had been very active on Twitter for the last few years and had made a lot of friends/connections on the platform, and it was amazing to meet some of them in real life for the first time. Not only did I get a chance to talk robots with them, but these conversations even led to a few drinks and meals after the conference, walks to some landmark sites in Kyoto, and even a souvenir shopping excursion. I ended up with a lot of new friends and loads of memories that I will cherish for a long time. I hope I get a chance to visit more ROSCons (and other robotics conferences) in the future and get a chance to meet these amazing people again. Another trip to Japan will definitely be a bonus.
Finishing off 2022
Finally, after returning from Japan, and suffering from jet lag for a few days, it was time for a trip to India after not being able to visit for a couple of years. I had a nice time visiting my family, traveling with them, and trying out all the food that I had missed over the years. The trip was certainly hectic at times, since I was about to move to a new apartment a day after returning to the Netherlands, and I had to arrange everything while being thousands of kilometers away.
I returned a day before moving out, so I had less than 24 hours to pack everything and clean my old place before returning the keys. Moving to the new apartment was certainly more time-consuming than I had expected. I had only rented fully furnished places before this, and there were so many things I hadn't expected. Now, in 2023, I've still not completely finished setting everything up. While I have my workspace and bedroom done, I still need to fix my curtains and install ceiling lamps. Definitely my top priority for the first few months of 2023.
Finally, I must say that 2022 has been an amazing year, perhaps my favorite year since the pandemic - I got to work on some fun projects, learned a lot, met some amazing people, played with some high-tech robots, visited Japan where I tried out some amazing food and clicked some of my best pictures, visited my family after a long time, and finally, moved to a new apartment. I hope 2023 is just as exciting, although I would like it to be slightly less hectic.
Plans for 2023
For 2023, I do have some exciting new plans. First, I want to finish setting up my new apartment. It will take some time, so I do have a few projects I want to work on in parallel. In 2022, the ROS 2 Galactic distribution reached end-of-life (EOL). So, the first robotics project for me in 2023 is to upgrade to ROS 2 Humble, which means I need to upgrade to Ubuntu 22.04. This distribution does not support ROS 1 Noetic, so I cannot use the bridge technique to migrate node-by-node. However, since I have the low-level control and the high-level launch files all configured in ROS 2, setting up Nav2 would definitely be straightforward. After learning about BehaviorTree.cpp 4.0 at ROSCon, I also want to write new behavior trees from scratch rather than upgrading my earlier attempts using the earlier version.
The next project is to work on a micro-ROS robot. Last year, I also spent some spare time designing a three-wheeled platform that I got to assemble and wire up in the last few days of 2022. This year, my goal is to develop the software. The platform consists of three Feetech STS3215 serial servo motors attached to three omniwheels, and is powered by an NP-F750 battery. The system uses an Arduino Nano RP2040 Connect as the brains. For this project, I want to leverage the micro-ROS experiments that I tried out using the same Arduino device last year, and also my initial experiments with the Feetech motors.
Unlike previous years, I don't want to over-estimate things and will limit myself to these two technical projects (alongside fixing up the apartment). Just like last year, I expect to have a few (unplanned) side quests along the way, and I will write about them when the time comes. That said, I will continue blogging about my experiences - the only change being that it will be here on Hashnode, rather than on GitHub pages. My old blog is archived for posterity and will remain on GitHub pages since I'm too lazy to migrate (and fix) these posts to Hashnode.
Finally, after the ROSCon 2022 experience, I have plans to visit another robotics conference this year. ROSCon 2023 is happening in the USA, and I will not be able to attend. So, I will instead try to visit ICRA 2023 in London in May. I also intend on visiting another Asian country this year before going on another trip to India. My current plans are for a return trip to Japan, but this might change - I've also heard good things about Vietnam...
That said, here's to an amazing 2023, and see you in the next update!